- Visión General
- Perfil de la empresa
Información Básica.
No. de Modelo.
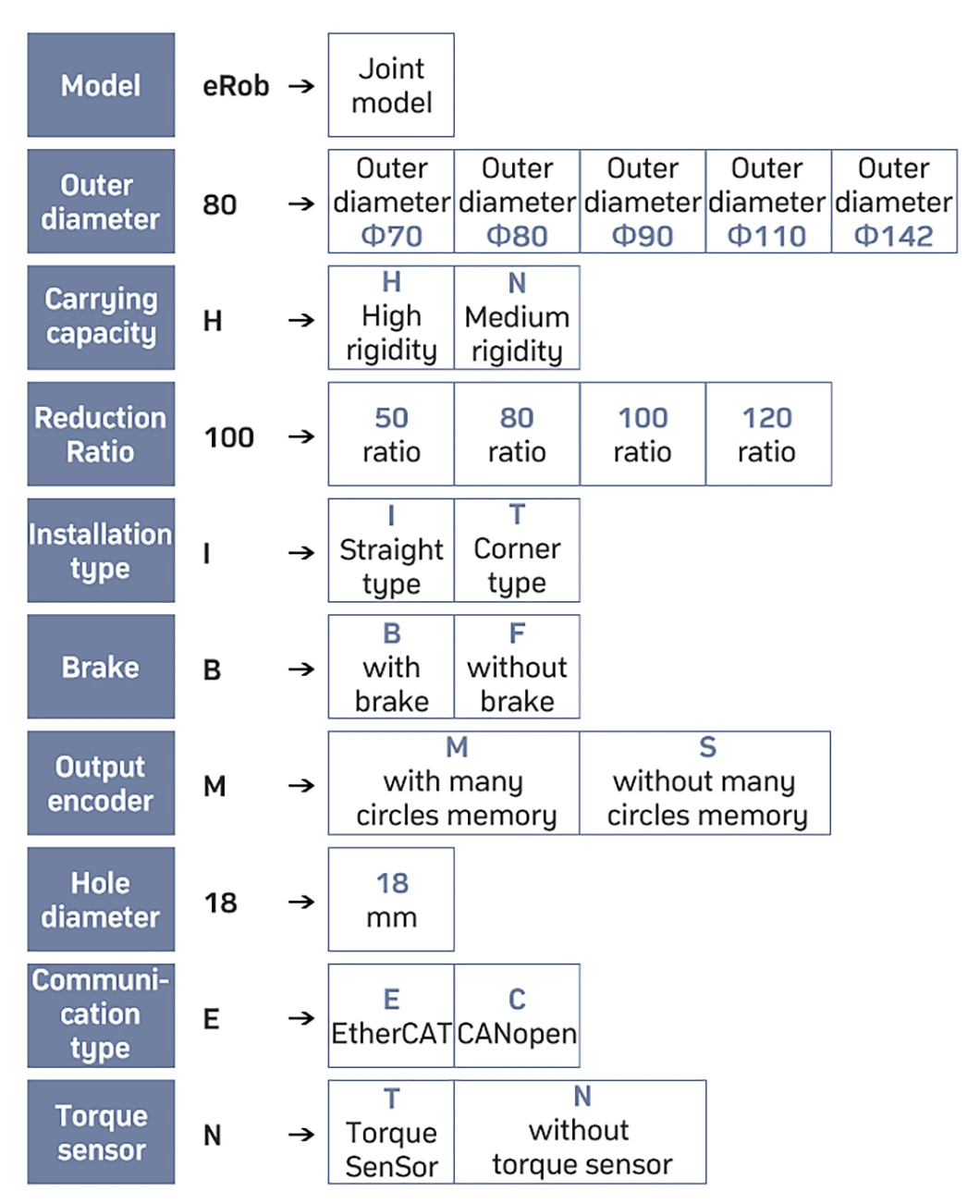
eRob170H50I
Tipo
Z2
Certificación
CE
Marca
Tinsmith
nombre del producto
brazo robot pesado de alto par de apriete junta hueca del robot ser
relación de reductor armónica
40-80
par máximo de arranque-parada
519nm
par nominal
206nm
máximo momentáneo permitido de
980nm
velocidad máxima de salida
25rpm
potencia del motor
1500w
corriente nominal
45a
corriente máxima
98A
peso
9,3kg
tensión de alimentación
48v
diámetro de orificio pasante
18mm
clase ip
ip54
tipo de freno del motor
freno de amortiguación de fricción
modo de comunicación
Ethercat/canopen/Modbus
Paquete de Transporte
Express DHL, FedEx
Especificación
iron, steel
Marca Comercial
TINSMITH
Origen
China
Código del HS
8479909090
Capacidad de Producción
10000/Year
Descripción de Producto
Brazo robótico automático accionamiento armónico Caja de cambios eje hueco servomotor actuador de la junta del robot
Introducción al producto
Este módulo de unión de robots de la serie eRob es un producto de módulo de unión estandarizado basado en nuestros propios servoaccionamientos y codificadores absolutos basados en años de experiencia al servicio de los clientes, lo que hace que el desarrollo de robots sea más fácil, más rápido y más seguro.
Estos módulos de unión de robot de la serie eRob incluyen eRob70, eRob80, eRob90, eRob110, eRob142, eRob170 etc., con un diseño exquisito y una estructura compacta. El tamaño compacto incluye servocontroladores, codificador de valor absoluto del lado del motor, codificador de valor absoluto del lado de salida y motores de par sin marco, frenos, reductores armónicos de precisión y otros componentes principales, que ahorran a los clientes cientos de selección de componentes mecánicos y electrónicos, diseño, adquisición, mano de obra de montaje y costes de tiempo.

Características del producto
Los módulos de junta de robots DE TINSMITH ayudan a los clientes a ahorrar la mano de obra y el costo de tiempo de seleccionar, diseñar, comprar y ensamblar cientos de dispositivos mecánicos y electrónicos.

El servomotor de la junta del robot eRob170I tiene un diámetro exterior de 170mm, una altura de 144,9mm y un orificio pasante de 18mm. 9290g peso superligero, relación de peso muerto de par hasta 50N m/kg.
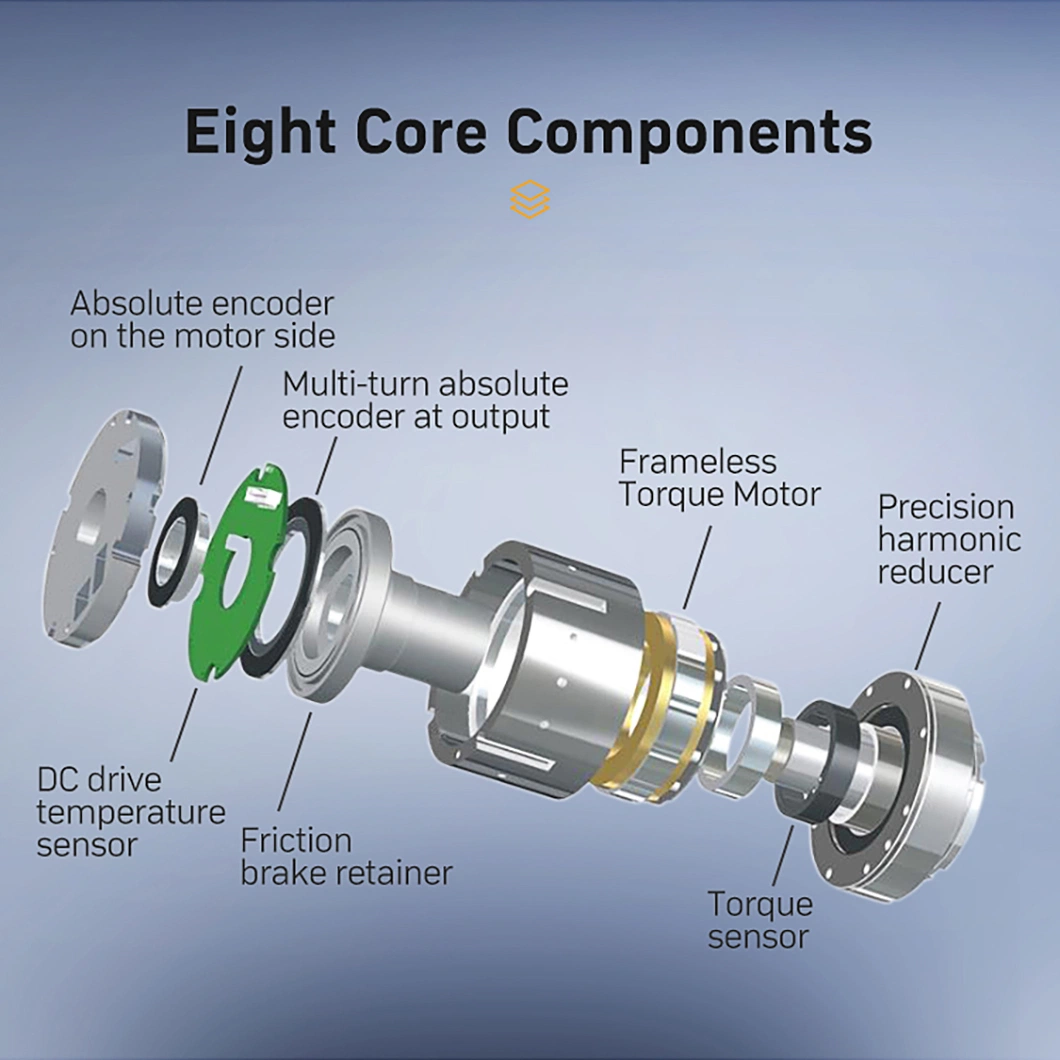
Este módulo de junta de robot de la serie incluye ocho componentes principales como se indica a continuación, codificador de valor absoluto del extremo del motor, codificador absoluto multivuelta en la salida, motor de par sin marco, reductor armónico preciso, sensor de par, retenedor de freno de fricción y sensor de temperatura de accionamiento de CC.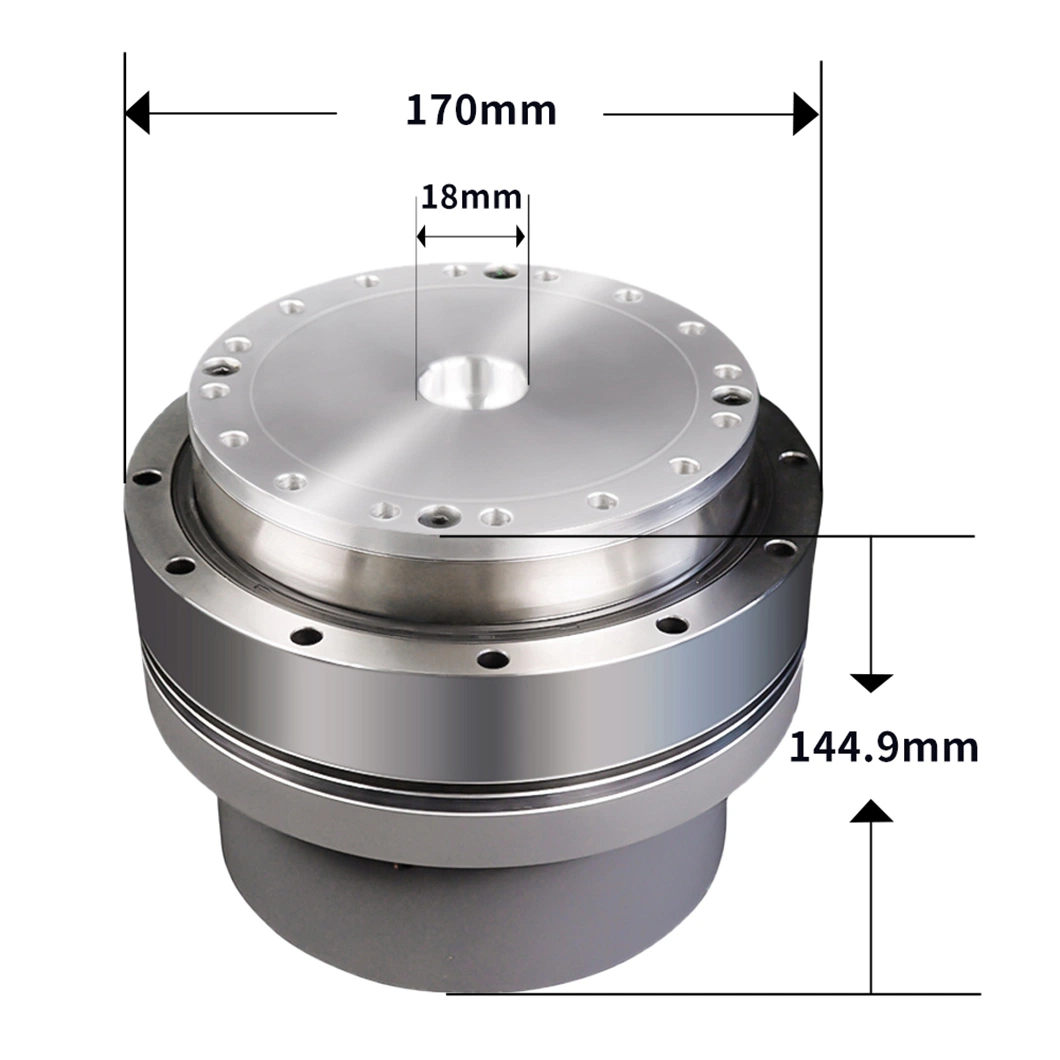
Varias especificaciones y tamaños para la junta del robot de la serie eRob DE TINSMITH módulos

Servocontrolador integrado. Protocolos de comunicación
Con protocolos de comunicación EtherCAT, CANopen, Modbus.
Posición, velocidad, PID de bucle de corriente ajustable en línea.
Entrada analógica de ± 10V incorporada.
Impulso y dirección, E/S, RS485,
Codificador externo e interfaz STO,
Todo en el espacio de DXL=70x75,3mm (para eRob70H) 110*115,2mm para motor de junta de robot eRob110I.

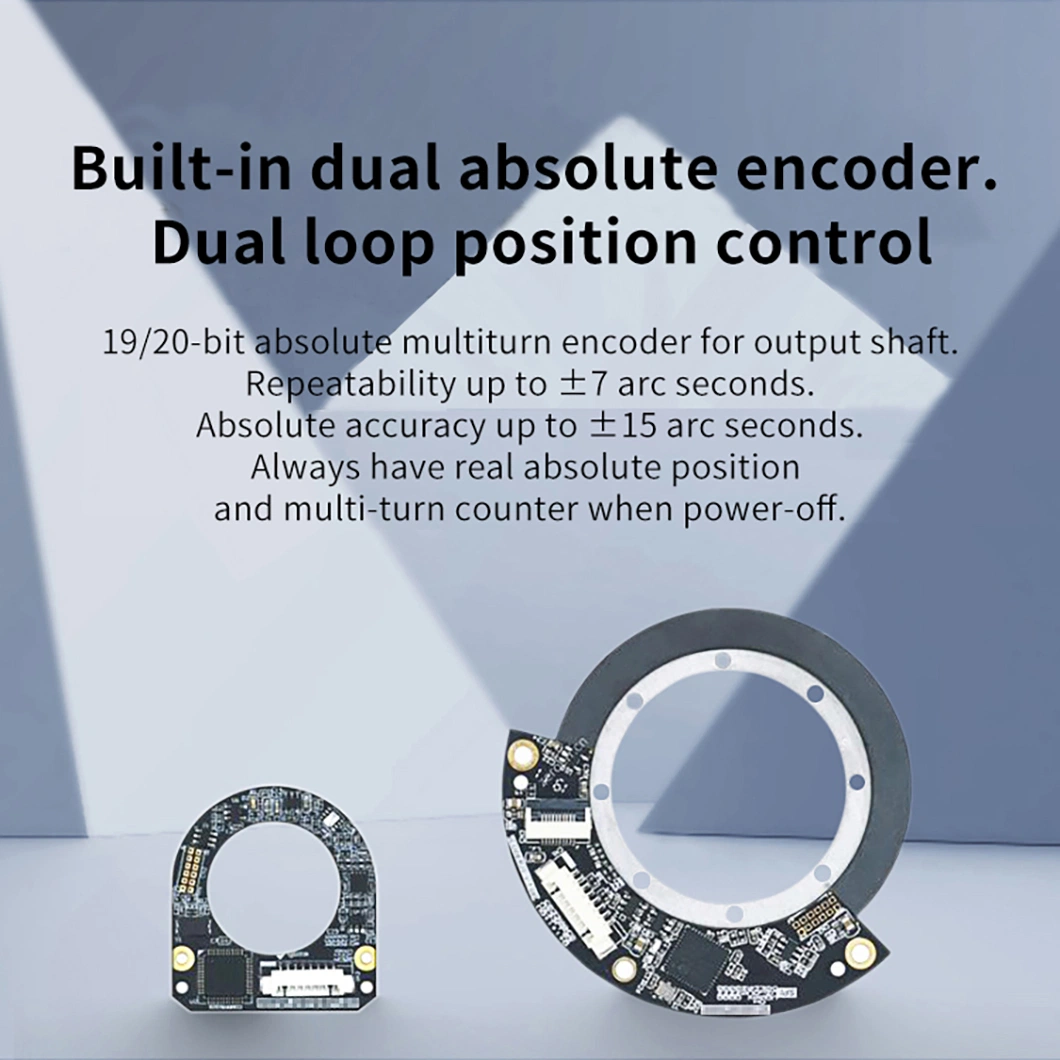
Codificador absoluto doble integrado. Control de posición de bucle doble
encoder multivuelta absoluto de 19/20 bits para eje de salida.
Repetibilidad de hasta ±7 segundos de arco.
Precisión absoluta de hasta ±15 segundos de arco.
Tenga siempre una posición absoluta real y un contador multivuelta al apagar el equipo.
Freno de fricción en el interior
Frenado suave y estable.
Sin holgura; sin holgura.
No hay necesidad de moverse al encender.
Sin desgaste.
Se puede utilizar como parada de emergencia.

Número de producto
Parámetro de producto del módulo de junta del robot eRob170
Lista de embalaje
1. ERob módulo de unión motor*1
2,48V conector de alimentación (2Pin)*2
3.CANabrir el conector y el cableado (3 patillas)*2
4.conector EtherCAT y cableado (4Pin)*2
5.conector de E/S y cableado (12pin)-opcional

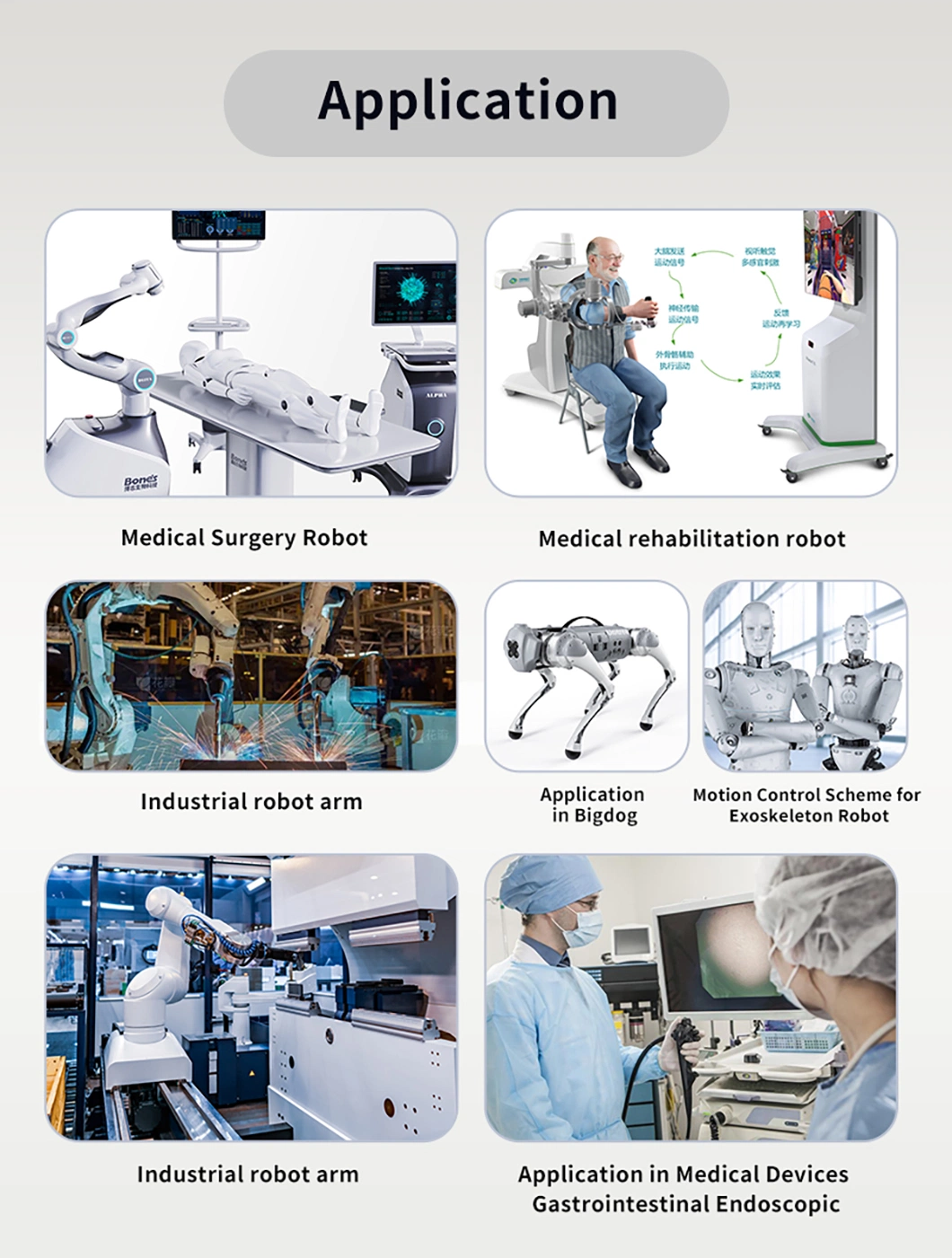
Aplicación del módulo de junta del robot de la serie eRob
Este tipo de junta de robot m Contodules podría ser utilizado para Motionrol Scheme para Exoesqueleto Robot, dispositivos médicos Endoscópica gastrointestinal, Robot de rehabilitación médica, bigdog, brazo de robot industrial, robot de soldadura, etc.

Introducción al producto
Este módulo de unión de robots de la serie eRob es un producto de módulo de unión estandarizado basado en nuestros propios servoaccionamientos y codificadores absolutos basados en años de experiencia al servicio de los clientes, lo que hace que el desarrollo de robots sea más fácil, más rápido y más seguro.
Estos módulos de unión de robot de la serie eRob incluyen eRob70, eRob80, eRob90, eRob110, eRob142, eRob170 etc., con un diseño exquisito y una estructura compacta. El tamaño compacto incluye servocontroladores, codificador de valor absoluto del lado del motor, codificador de valor absoluto del lado de salida y motores de par sin marco, frenos, reductores armónicos de precisión y otros componentes principales, que ahorran a los clientes cientos de selección de componentes mecánicos y electrónicos, diseño, adquisición, mano de obra de montaje y costes de tiempo.

Características del producto
Los módulos de junta de robots DE TINSMITH ayudan a los clientes a ahorrar la mano de obra y el costo de tiempo de seleccionar, diseñar, comprar y ensamblar cientos de dispositivos mecánicos y electrónicos.

El servomotor de la junta del robot eRob170I tiene un diámetro exterior de 170mm, una altura de 144,9mm y un orificio pasante de 18mm. 9290g peso superligero, relación de peso muerto de par hasta 50N m/kg.
Este módulo de junta de robot de la serie incluye ocho componentes principales como se indica a continuación, codificador de valor absoluto del extremo del motor, codificador absoluto multivuelta en la salida, motor de par sin marco, reductor armónico preciso, sensor de par, retenedor de freno de fricción y sensor de temperatura de accionamiento de CC.


Varias especificaciones y tamaños para la junta del robot de la serie eRob DE TINSMITH módulos

Servocontrolador integrado. Protocolos de comunicación
Con protocolos de comunicación EtherCAT, CANopen, Modbus.
Posición, velocidad, PID de bucle de corriente ajustable en línea.
Entrada analógica de ± 10V incorporada.
Impulso y dirección, E/S, RS485,
Codificador externo e interfaz STO,
Todo en el espacio de DXL=70x75,3mm (para eRob70H) 110*115,2mm para motor de junta de robot eRob110I.

Codificador absoluto doble integrado. Control de posición de bucle doble
encoder multivuelta absoluto de 19/20 bits para eje de salida.
Repetibilidad de hasta ±7 segundos de arco.
Precisión absoluta de hasta ±15 segundos de arco.
Tenga siempre una posición absoluta real y un contador multivuelta al apagar el equipo.

Freno de fricción en el interior
Frenado suave y estable.
Sin holgura; sin holgura.
No hay necesidad de moverse al encender.
Sin desgaste.
Se puede utilizar como parada de emergencia.

Número de producto

Parámetro de producto del módulo de junta del robot eRob170
| Modelo | eRob170H | ||||
| Relación de reducción armónica | SHF 40-50 | SHF 40-80 | SHF 40-100 | SHF 40-120 | |
| Par máximo de arranque-parada(N.m) | 402 | 519 | 568 | 617 | |
| Par nominal (N.m) | 137 | 206 | 265 | 294 | |
| Par máximo admisible momentáneo (N.m) | 686 | 980 | 1080 | 1180 | |
| Velocidad máxima de salida (RPM) | 40 | 25 | 20 | 16,7 | |
| Potencia del motor (W) | 1500 | ||||
| Corriente nominal (A) | 45 | ||||
| Corriente máxima (A) | 98 | ||||
| Sin modelo de freno | Inercia del rotor(g.mm²) | 1517148 | |||
| Diámetro exterior x longitud (mm) | 170x144.9 | ||||
| Peso (kg) | 9,29 | ||||
| Con modelo de freno | Inercia del rotor(g.mm²) | 1545541 | |||
| Diámetro exterior x longitud (mm) | 170x144.9 | ||||
| Peso (kg) | 9,5 | ||||
| Parámetro común | Tensión de alimentación: 48V (±10%), diámetro de orificio pasante: 18mm, clase IP: IP54, tipo de freno: Freno de fricción | ||||
| Configuración de ensamblaje opcional | Modo de comunicación: EtherCAT/CANopen/Modbus, resolución del codificador de salida: 19/20bit, precisión de posicionamiento de repetición/absoluta: ±7/±15 arcosegundos o ±10/±25 arcosegundos | ||||
Lista de embalaje
1. ERob módulo de unión motor*1
2,48V conector de alimentación (2Pin)*2
3.CANabrir el conector y el cableado (3 patillas)*2
4.conector EtherCAT y cableado (4Pin)*2
5.conector de E/S y cableado (12pin)-opcional

Aplicación del módulo de junta del robot de la serie eRob
Este tipo de junta de robot m Contodules podría ser utilizado para Motionrol Scheme para Exoesqueleto Robot, dispositivos médicos Endoscópica gastrointestinal, Robot de rehabilitación médica, bigdog, brazo de robot industrial, robot de soldadura, etc.

Zhengzhou defy Mechanical&Electrical Equipment Co., Ltd es un fabricante profesional de Robótica Joint Module. Nuestra fábrica se dedica a la investigación del motor de la junta del robot desde 2010s, más de 10 años de experiencia hace que nuestro producto de calidad de rango en la posición de líder en China. Con una producción anual de 500.000 juegos de varios productos para el mercado, con alta precisión y rendimiento estable, nuestros módulos conjuntos robóticos son recibidos por clientes de la India, Tailandia, Irán, Corea del Sur, Federación de Rusia, SUECIA, Irlanda, Polonia, EE.UU., Francia, etc.
